变频器设计基础
变频器就是可以改变交流电频率的一种装置,用它对交流电进行调速,就可以使得电机实现无级调速。
我国交流电工频为50Hz,通过变频器可以对交流电进行从0到几千甚至上万Hz之间任意调整。
主要对异步电机进行调速。
异步电机
直流电机结构复杂,维护保养困难,在电力拖动系统中,需要转速一定,调速性能要求不高的情况下用的都是交流电机。
交流电机没换向器 结构简单,维护方便,成本低。但是调速性能较差xxx特别差。
交流异步电机同步转速(旋转磁场转速)$n_1$ 表示
$$ n<n_1=\frac{60f}{p} $$
其中 $f$ 为交流电频率, $p$ 为电机的极对数。 $n$ 为电机的实际转速。
转差率$s$的定义为
$$ s=\frac{n_1-n}{n_1}\ \ \ \left( 0<s<=1 \right) $$
电机转速的变式:
$$ n=(1-s)n_1=\frac{60f}{p} $$
要改变电机的转速就只能在 $f$ $p$ $s$ 这三个方面想办法。
变频器就是通过改变频率 $f$ 来对电机进行调速的器件。
异步电动机的VF控制(开环控制简单粗暴)
单独改变频率是不行的 还需要同时对电压进行改变。
V/f控制就是保证输出电压跟频率成正比的控制,使电动机的磁通保持一定,避免弱磁和磁饱和现象的产生,多用于风机、泵类节能型变频器用压控振荡器。
解释:
电机运行时自感电动势 $E$
$$E\propto f\varPhi $$
$\varPhi$为电机的磁通。
电源电压$U$和自感电动势$E$在额定负载时差不多一致。
定子电路简化图如下:
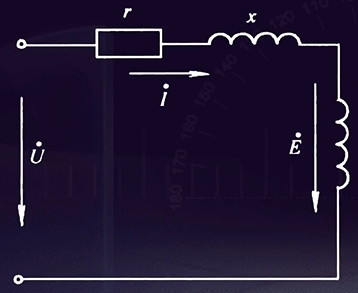
r与x为漏磁阻抗。其之间的关系为:
$$U= E+I(r+jx)$$
额定频率时,漏磁阻抗上的电压很小。所以电源电压$U$和自感电动势$E$在额定负载时差不多一致。则可以得到:
$$U\propto f\varPhi $$
$$\varPhi\propto U/f $$
所以可以得到电机的磁通,与电机电压成正比,与频率成反比关系。使用变频器时,使得频率降低,电压不变的话。则磁通会升高。磁通的增加会导致xxx
磁化曲线:电机磁通大小与励磁电流的关系曲线。
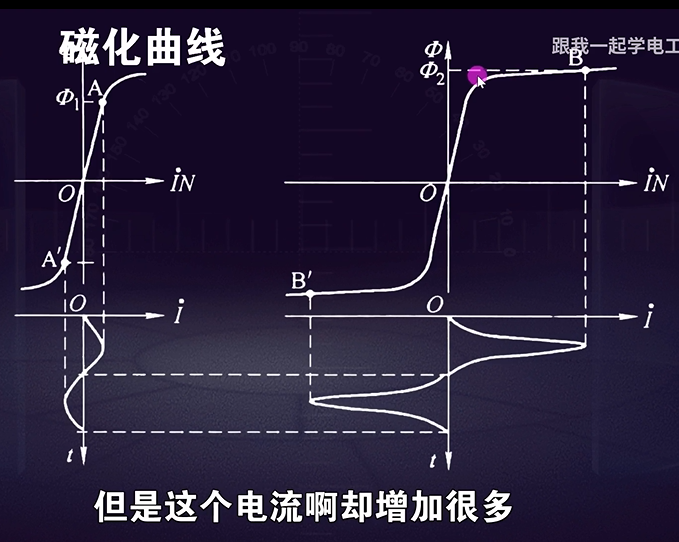
磁通增加会导致磁通到达B区域,使得电流波形尖锐。所以只变频不变压的话,电机磁通会增加,电机铁芯出现深度饱和。励磁电流急剧增加,使得电机损耗增加,可能出现电机过热烧毁。
所以在改变频率时,必须保证磁通不变,为一个恒定值。
$$\varPhi\propto U/f $$
即保持电压和频率的比值不变。同步降低与升高。得到如下基本的UF曲线**。
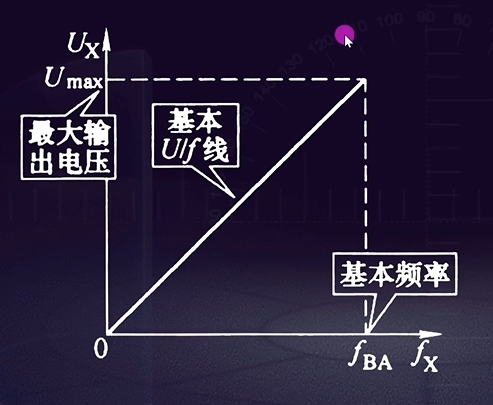
而别忘了! U是代替E而出现的。 在额定频率也就是曲线右上角一部分下,漏磁阻抗所占分压很少,所以U可以很近似E。但是在此点一下,即轻载或者空载条件下,低频区域U便不能再代替E了。 (反电动势E在电源电压U中所占比例变小了)。这时还按照这个曲线控制电机就不行了。因为
$$U= E+I(r+jx)$$
$I(r+jx)$所占比例高了。不能再近似处理了 E小了很多。而我们还按照
$$\varPhi\propto U/f $$
这时磁通会变小 因为实际是 :
$$\varPhi\propto E/f $$
因此低频时,电机的转矩会变小!!
这时需要对低频情况下的UF曲线进行补偿得到下图补偿uf曲线:
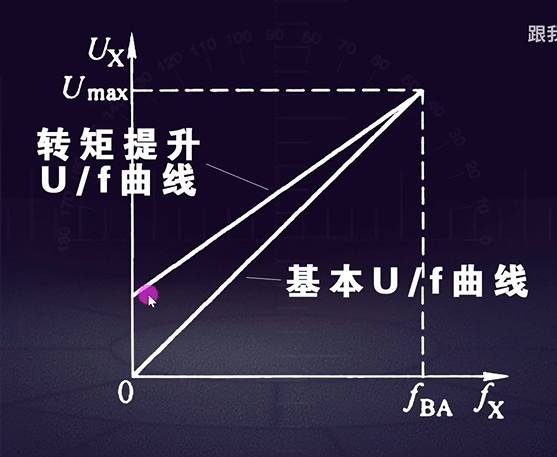
通过改变UF比值来控制电机的方法就叫做变频器的V/F控制。UF曲线是依据负载特性 事先选定好的。
直白点说,V/F控制其实就是开环控制,在这种模式下,变频器按照给定指令输出一定幅值和频率的电压,至于电机到底是运行多少转速、什么状态变频器是不关心的。因为变频器此时没有对电机的状态进行反馈及控制。 而矢量控制则不同,一般我们都是采用带转速反馈的矢量控制模式,这是一种真正意义上的闭环控制方式。在这种控制模式下,变频器对电机的运行转速进行精确控制,它会根据转速指令的大小实时控制电机实际转速。 V/F控制一般用于要求不太高的场合,对于电机转速控制精度没有什么要求的应用。而矢量控制是一种通用性极强的控制模式,几乎没有什么缺点,凡是要求控制精度较高时,用矢量控制肯定是没什么问题的。另外,尤其是提升应用时,尤其推荐带转速反馈的矢量控制模式。