参考:控制器图解-PX4-Guide-main
本节包括PX4主要控制器的图解。
多旋翼的控制架构
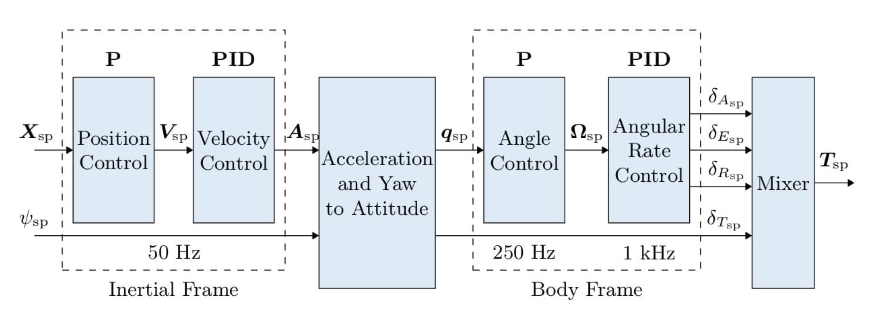
这是一个标准的级联控制架构。
控制器采用P和PID控制的组合方式。
Estimates come from EKF2.
在某些模式下,外环(位置回路) 可能会被绕过 (在图中表示为外环之后增加一个多路开关)。 只有在位置保持模式或某轴无速度请求时,位置回路才会发挥作用。
多旋翼角速率控制器
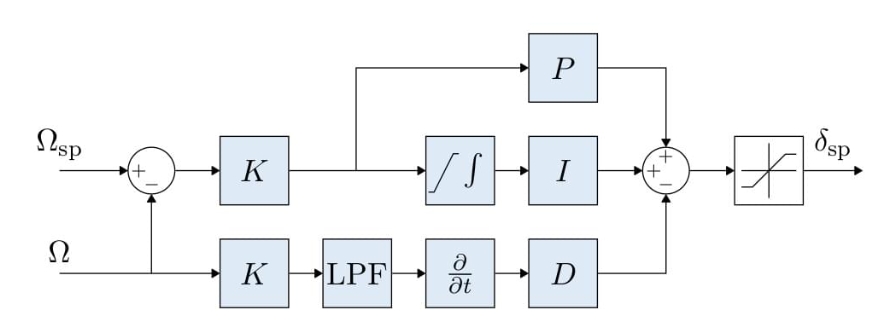
采用K-PID控制器。
为了防止积分饱和,积分环节的权重是受限的,
输出受到限制(在控制分配模块中),通常为 -1 和 1。
低通滤波器 (LPF) 用于导数路径以减少噪声(陀螺仪驱动器向控制器提供滤波后的导数)。